دوشنبه 28 آبان 1403 - 01:53
ساخت حسگری شبیه به پوست که خود را با هر چیزی تطبیق میدهد
سیناپرس/ محققان مؤسسه رباتیک و هوش ماشینی مونیخ (MIRMI) در دانشگاه صنعتی مونیخ (TUM) فرآیندی خودکار برای ساخت حسگرهای نرم توسعه دادهاند. این سلولهای اندازه گیری را میتوان تقریباً به هر نوع جسمی متصل کرد. برای این حسگرها، برنامههای کاربردی به ویژه در رباتیک و پروتز در نظر گرفته شده است.
سونیا گروس میگوید: «تشخیص و حسگری محیط برای درک نحوه تعامل مؤثر با محیط ضروری است. یک عامل مهم برای تعامل با اشیا، شکل آنهاست.»
این محقق مؤسسه رباتیک و هوش ماشینی در مونیخ میگوید: «این نتایج تعیین میکند که چگونه میتوانیم وظایف خاصی را انجام دهیم. علاوه بر این، ویژگیهای فیزیکی اجسام، مانند سختی و انعطافپذیری آنها، برای مثال بر نحوه درک و دستکاری آنها تأثیر میگذارد.»
آنچه در رباتیک و پروتز مهم است، تقلید واقع گرایانه از مهارت های حسی-حرکتی فردی مانند مهارت های موجود در دست انسان است. در رباتیک، حسگرهای نیرو و گشتاور به طور کامل در اکثر دستگاهها ادغام میشوند. این حسگرها بازخورد ارزشمندی را در مورد تعاملات سیستم روباتیک، مانند دست مصنوعی، با محیط اطراف ارائه میدهند.
با این حال، حسگرهای سنتی از نظر امکانات سفارشی سازی محدود شدهاند. همچنین نمیتوان آنها را به اشیاء دلخواه متصل کرد. تاکنون هیچ فرآیندی برای تولید حسگر برای اجسام صلب با اشکال و اندازه های دلخواه وجود نداشته است.
این نقطه شروع تحقیقات سونیا گروس و دیگو هیدالگو بود. این گروه تحقیقاتی همچنین چارچوبی را ایجاد کرده است که تا حد زیادی فرآیند تولید این پوست را خودکار می کند.
هیدالگو میگوید: «ما از نرم افزار برای ساختن ساختار سیستمهای حسی استفاده میکنیم. سپس این اطلاعات را به یک چاپگر سه بعدی میفرستیم که حسگرهای نرم ما در آنجا ساخته میشوند.»
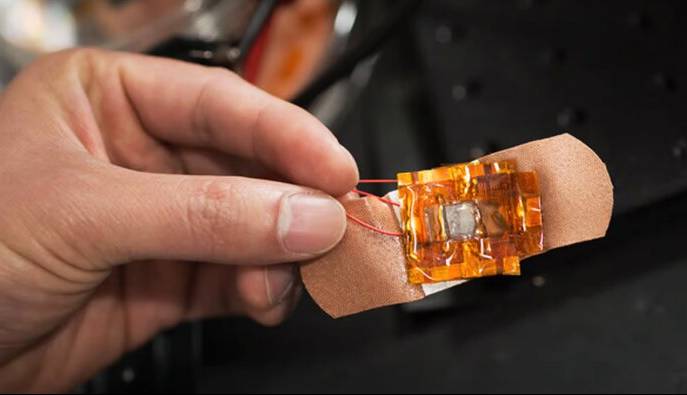
چاپگر یک خمیر سیاه رسانا را به سیلیکون مایع تزریق میکند. سیلیکون سفت میشود، اما خمیر توسط آن محصور شده و مایع باقی میماند. هنگامی که حسگر فشرده یا کشیده میشود، مقاومت الکتریکی آنها تغییر میکند.
این به ما میگوید که چه مقدار نیروی فشاری یا کششی به یک سطح اعمال میشود. هیدالگو توضیح می دهد که ما از این اصل برای به دست آوردن یک درک کلی از تعامل با اشیا و به طور خاص، برای یادگیری نحوه کنترل یک دست مصنوعی در تعامل با این اشیا استفاده میکنیم.
به نقل از ستاد توسعه نانو، حسگرهای تعبیه شده در سیلیکون با سطح مورد نظر (مانند انگشتان یا دست ها) تنظیم میشوند و دادههای دقیقی را ارائه میدهند که میتواند برای تعامل با محیط استفاده شود.
پروفسور سامی حدادین، مدیر اجرایی MIRMI می گوید: «ادغام این حسگرهای نرم و پوست مانند در اشیاء سه بعدی، مسیرهای جدیدی را برای حسگری لمسی پیشرفته در هوش مصنوعی باز میکند.»
پربیننده ترین
-
عکس مسی درآمد؛ آخرین توپ طلا با آرایشگر ویژه!
-
10 جایزه 5 میلیون تومانی برای کاربران آخرین خبر (مهلت شرکت در مسابقه تا 9 آذر تمدید شد.)
-
10 جایزه 5 میلیون تومانی برای کاربران آخرین خبر (مهلت شرکت در مسابقه تا 9 آذر تمدید شد.)
-
آخرین وضعیت راهها در چهارمین روز از سال جدید؛ محور چالوس از شنبه دوباره بسته میشود
-
زنده؛ بیرانوند در یک قدمی استقلال
-
"دنا پلاس اتومات" بخریم یا "تارا اتومات؟"/ مقایسه اختصاصی "آخرینخودرو" از دو خودروی پرطرفدار
-
چالش/ بازیکن داخل تصویر رو حدس بزن (16)
-
5 نشانه ضعیف شدن ریه ها و بهترین روش تقویت آن چیست؟
-
لندکروزر یا ۲۰۶؟ / مقایسه جالب "آخرینخودرو" به بهانه سخنان جنجالی میرسلیم
-
سپ، برترین شرکت در خاورمیانه شد
-
چالش/ بازیکن داخل تصویر رو حدس بزن (28)
-
ویدیو تست و بررسی فیدلیتی پرایم جدید در آخرین خودرو
-
چالش/ بازیکن داخل تصویر رو حدس بزن (14)
-
لحظه به لحظه با جدال پرسپولیس مقابل النصر
-
چالش/ بازیکن داخل تصویر رو حدس بزن (22)
-
یحیی مچ ساپینتو را خواباند / برد ارزشمند پرسپولیس در صدمین شهرآورد
-
چالش/ بازیکن داخل تصویر رو حدس بزن (19)
-
چالش/بازیکن داخل تصویر رو حدس بزن (11)
آخرین اخبار
-
وضعیت VAR لیگ برتر ایران از زبان مسعود مرادی
-
مرادی: بعضی از اخراج های ما آماتورگونه است
-
جایزه ویژه به مودریچ؛ پرشورترین بازیکن ملی!
-
فرانسه ایتالیا را در میلان تحقیر کرد
-
محمد صلاح: رفتار سرد مورینیو زندگی من را تغییر داد!
-
به مناسبت هجدهمین سالگرد درگذشت فرانس پوشکاش، اسطوره رئال مادرید و مجارستان
-
دقیقی: از چند تیم پیشنهاد داشتم اما خیبر انتخابم بود
-
گل سوم فرانسه به ایتالیا توسط ربیوت؛ ایتالیا ۱ - فرانسه ۳
-
سورپرایز ترامپ در خاورمیانه با سیگنالهای مختلط و «استراتژی دیوانهوار»؟
-
پیشنهاد بزرگ رونالدو برای نقل و انتقالات النصر
-
اولین هتریک مویزه کین در سری آ برابر هلاس ورونا
-
ظریف و دیگر هیچ؟
-
باشگاه استقلال به یاد غلام سرطلایی
-
خسرو حیدری شاگردش را به موسیمانه سپرد!
-
شوک شبانه خودرو؛ محصولات سایپا هم گران شد



سایر اخبار مرتبط
نظرات
ثبت نظر
مهمترین اخبار

شوک شبانه خودرو؛ محصولات سایپا هم گران شد
دوشنبه 28 آبان 1403 - 00:27:31

ایران خودرو مجوز افزایش نرخ گرفت؟
دوشنبه 28 آبان 1403 - 00:06:21

هشدار به خریداران سکه؛ این قطعه سکه را ۸.۷ میلیون گرانتر میخرید
یکشنبه 27 آبان 1403 - 23:08:33

بانک ملت: مشکل حل و سرویسها برقرار شد
یکشنبه 27 آبان 1403 - 20:41:07

فارس: سامانه پرداخت جایگاه سوخت برای بانکهای غیر از ملت فعال است
یکشنبه 27 آبان 1403 - 20:02:00